
2026知到答案 现代控制理论(大连民族大学) 最新智慧树满分章节测试答案
绪论 单元测试
1、单选题:
下列语句中,不正确的是( )。
选项:
A:在现代控制理论中,对控制系统的分析和设计主要是通过对系统的状态变量的描述来进行的,基本的方法是时间域方法。
B:现代控制理论是建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分,可以解决经典控制理论不能解决的所有控制难题。
C:现代控制理论比经典控制理论所能处理的控制问题要广泛得多,包括线性系统和非线性系统,定常系统和时变系统,单变量系统和多变量系统。
D:20世纪50年代中期,空间技术的迅速发展迫切要求建立新的控制原理,以解决诸如把宇宙火箭和人造卫星用最少燃料或最短时间准确地发射到预定轨道一类的控制问题。
答案: 【现代控制理论是建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分,可以解决经典控制理论不能解决的所有控制难题。】
第一章 单元测试
1、单选题:
单输入-单输出线性时不变系统状态空间表达式的矢量矩阵形式为( )。
选项:
A:
B:
C:
D:
答案: 【】
2、单选题:
已知单输入单输出系统的传递函数为
则系统状态空间表达式为( )。
选项:
A:
B:
C:
D:
答案: 【】
3、单选题:
已知单输入单输出系统的微分方程为
则系统状态空间模型为( )。
选项:
A:
B:
C:
D: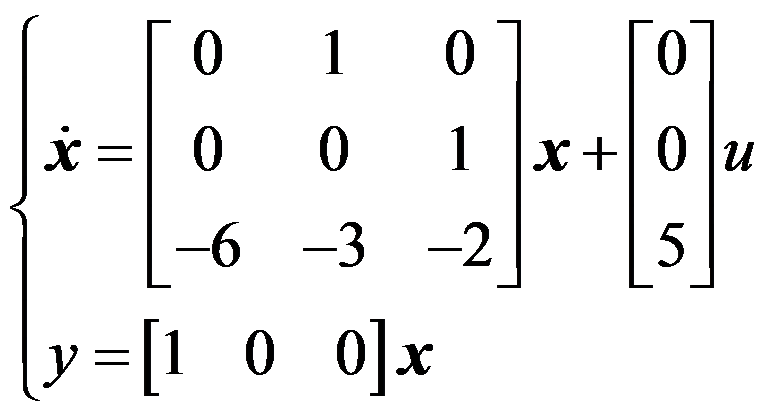
答案: 【】
4、单选题:
线性定常系统的数学模型描述是( )。
选项:
A:
B:
C:
D:
答案: 【】
5、单选题:
已知质量-弹簧-阻尼系统如下图所示: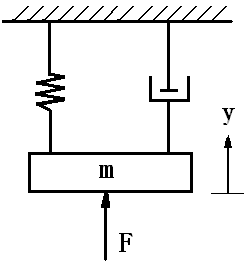
图中质量为y的物体受到外力F的作用,产生位移y。以外力F为输入和位移m为输出,系统状态空间模型为( )。
选项:
A:
B:
C: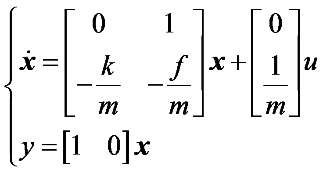
D: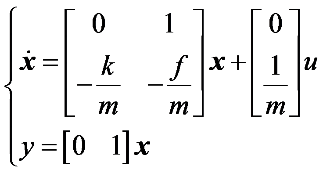
答案: 【】
6、多选题:
现代控制理论是建立在状态空间法基础上的-种控制理论,是自动控制理论的一个主要组成部分,比经典控制理论所能处理的控制问题要广泛得多,适合分析和设计下列哪种系统? ( )
选项:
A:线性定常系统
B:非线性系统
C:多输入多输出系统
D:线性时变系统
答案: 【线性定常系统;
非线性系统;
多输入多输出系统;
线性时变系统】
7、多选题:
现代控制理论已经应用在哪些领域( )
选项:
A:机器人控制
B:工业领域
C:倒立摆稳定控制
D:航天航空领域
答案: 【机器人控制;
工业领域;
倒立摆稳定控制;
航天航空领域】
8、多选题:
以下哪些条件下,状态变量可以描述系统的未来响应:( )
选项:
A:给定输入
B:给定动态方程
C:给定输出
D:给定当前状态
答案: 【给定输入;
给定动态方程;
给定当前状态】
9、多选题:
控制理论的发展可以分为哪几个阶段? ( )
选项:
A:现代控制理论
B:鲁棒控制理论
C:经典控制理论
D:自适应控制理论
答案: 【现代控制理论;
鲁棒控制理论;
经典控制理论】
10、多选题:
线性系统的状态空间表达式为: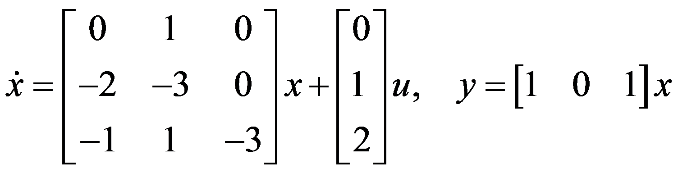
则系统的传递函数为( )。
选项:
A: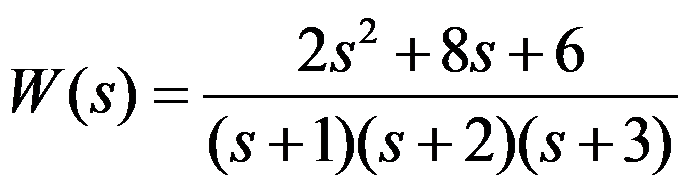
B:
C:
D:
答案: 【;
】
第二章 单元测试
1、单选题:
下面关于离散系统状态空间描述方程的解说法错误的是( )。
选项:
A:递推迭代法适用于所有定常、时变和非线性情况,但并不一定能得到解析解。
B:线性系统解的自由运动和强近运动分别与零状态响应和零输入响应一一对应。
C:线性时不变离散系统的系统矩阵G对解的收敛性起到决定性的作用。
D:解析法是针对线性系统的,其解分成两部分,一部分是零状态响应,一部分是零输入响应。
答案: 【线性系统解的自由运动和强近运动分别与零状态响应和零输入响应一一对应。】
2、多选题:
若取初始时刻 ,线性定常离散系统状态方程可以写为
,线性定常离散系统状态方程可以写为 ,则下列描述正确的是( )。
,则下列描述正确的是( )。
选项:
A: 为自由运动
为自由运动
B: 为受迫运动
为受迫运动
C: 为受迫运动
为受迫运动
D: 为自由运动
为自由运动
答案: 【为自由运动;
为受迫运动】
3、多选题:
已知线性定常系统的系统矩阵 ,则下面说法正确的是( )。
,则下面说法正确的是( )。
选项:
A:系统状态转移矩阵的逆矩阵为
B:系统的状态转移矩阵为
C:系统的特征值为-2,-3
D:系统的指数矩阵为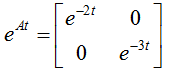
答案: 【系统状态转移矩阵的逆矩阵为;
系统的特征值为-2,-3;
系统的指数矩阵为】
4、多选题:
下面说法正确的是( )。
选项:
A:当A具有如下形式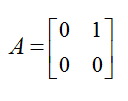 , 有
, 有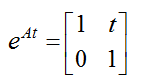
B:对给定的n×n常值矩阵A,有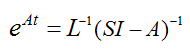
C:当A具有如下形式 , 有
, 有
D:当A为对角线矩阵,即A=diag{  }时,有
}时,有
答案: 【当A具有如下形式, 有;
对给定的n×n常值矩阵A,有;
当A为对角线矩阵,即A=diag{ }时,有】
5、多选题:
对代数等价的线性定常系统,下列论述正确的是( )。
选项:
A:它们具有相同能控规范形
B:它们的稳定性相同
C:它们的传递函数矩阵相同
D:它们具有相同的能观规范形
答案: 【它们具有相同能控规范形;
它们的稳定性相同;
它们的传递函数矩阵相同;
它们具有相同的能观规范形】
6、判断题:
线性定常系统的状态转移矩阵和系统的基本解阵间的一个基本关系式为: ( )
( )
选项:
A:对
B:错
答案: 【对】
7、判断题:
对线性定常连续系统进行离散化,使用的保持器为零阶保持器。( )
选项:
A:对
B:错
答案: 【对】
8、判断题:
对于离散时间系统,迭代法可以应用于定常系统和时变系统的求解。( )
选项:
A:错
B:对
答案: 【对】
9、判断题:
对于离散时间系统,Z反变换法可以应用于定常系统和时变系统的求解。( )
选项:
A:对
B:错
答案: 【错】
10、判断题:
线性定常离散系统的状态转移矩阵具有 的可分解性质。( )
的可分解性质。( )
选项:
A:对
B:错
答案: 【对】